关于激光雷达的一些问题和资料整理
Questions
Q1: 传统机械式激光雷达是如何发出多条激光的? 一个激光源在一个镜面上折射出16条,32条线?还是有16个,32个激光源在镜面上折射,最后向外发射?
Q2: 实际使用中涉及到了设置激光雷达的数据返回模式fast,strongest,dual mode。那么为何一根激光束会有两个数值?
Q3: 一个数据包中有12组数据,每组数据有一个strongest和last数据和一个强度数据。??
Q4: 旋转速度10Hz,就是说明1秒旋转10次,这意味着1秒种我可以取得10次数据。每一次取得的数据,相邻角度是多少?
参考: Velodyne VLP-16使用手册
Anwsers
A1: 传统机械式激光雷达是有多个激光源,在一个镜面上折射,从而向外发出多个激光线束。
A2: 当一根激光束照射到物体边缘的时候,会出现多个数值,信号最强的Strongest和最远的值Last。
Return mode: Single Mode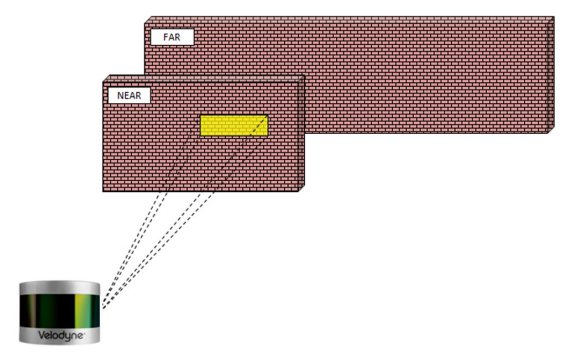
Return mode: Dual Mode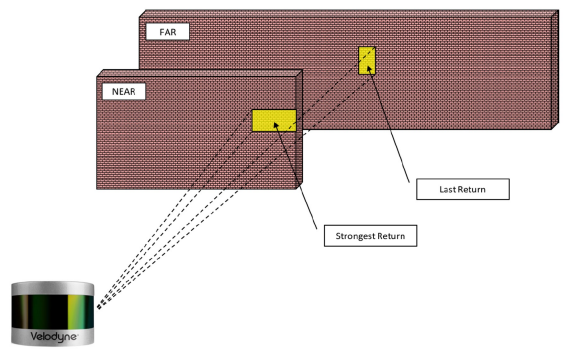
A3: dual模式下,每激光雷达旋转一圈返回2个数据包,1-11和12-22,single模式下,每一圈返回一个数据包,1-22。每个数据包中有12组数据,每组数据中都有16根线的数据值。(以16线激光雷达为例)
dual模式下,每个数据包中有6组数据,每组有一个Strongest值和Last值,因此一个数据包不够存放所有点云数据,一圈数据需要2个数据包。
single模式下,每个数据包有12组数据,Strongest值或者Last值,一个数据包正好存放所有点云数据。也正是因为这样,dual模式返回的点云数量是single模式返回点云数量的2倍。
Single Mode模式下返回的数据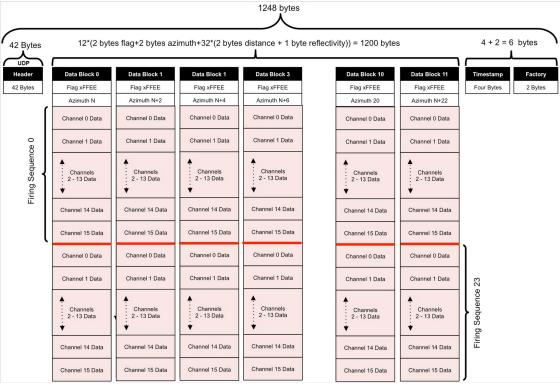
Dual Mode模式下返回的数据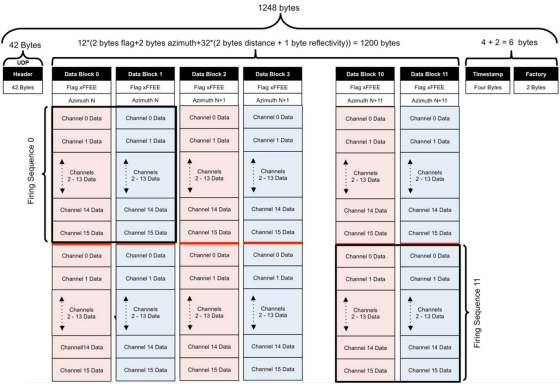
A4: 假设LiDAR为10Hz,那么就是1秒有10个周期。每个周期旋转360度。
水平分辨率为0.2度的话
$$
360度 \div 0.2度/次=1800次 \
1800次 \times 64点/次=115200点 \
$$
就是说,激光雷达旋转一周会获得115200个点,1秒就会获得
$$
115200 \times 10 = 1152000pts/s
$$
若LiDAR为20Hz,那么就是1秒有20个周期。因为旋转速度变化的快,水平分辨率也会变大。当水平分辨率为0.4的话
$$
360度 \div 0.4度/次=900次 \
900次 \times 64点/次=57600点 \
$$
那么激光雷达旋转一周就会获得57600点,1秒就会获得
$$
57600 \times 20 = 1152000pts/s
$$
不是说激光雷达1秒10个周期,每个相邻的周期固定间隔多少度旋转。每个周期就是360度。1秒就是转10圈或者20圈。每1圈对应1个数据包(或者2个数据包)